Angle Steel Corrosion Inspection Robot
Date: October 18, 2024
Author:Barcelo(Ziyang Wang)
Aenean fermentum vulputate eros, efficitur vehicula nunc accumsan tincidunt. Maecenas a nulla id sapien dignissim tincidunt. Suspendisse efficitur ipsum sit amet purus sodales pulvinar. Suspendisse eu venenatis eros.
Suspendisse efficitur ipsum sit amet purus sodales pulvinar. Suspendisse eu venenatis eros.Nunc facilisis diam velit, non facilisis justo lobortis ac. Etiam ante tortor, consequat vel felis id, blandit finibus magna. Curabitur vel urna id tortor ullamcorper molestie. Donec accumsan, sapien nec consectetur varius, nisl nibh maximus diam, non vulputate diam dolor at nunc. Suspendisse pulvinar, ante a tempor volutpat, ligula tellus pharetra libero, ac porttitor tortor turpis at magna.
Nunc facilisis diam velit, non facilisis justo lobortis ac. Etiam ante tortor, consequat vel felis id, blandit finibus magna.
CONTENTS
Research Background and Motivation
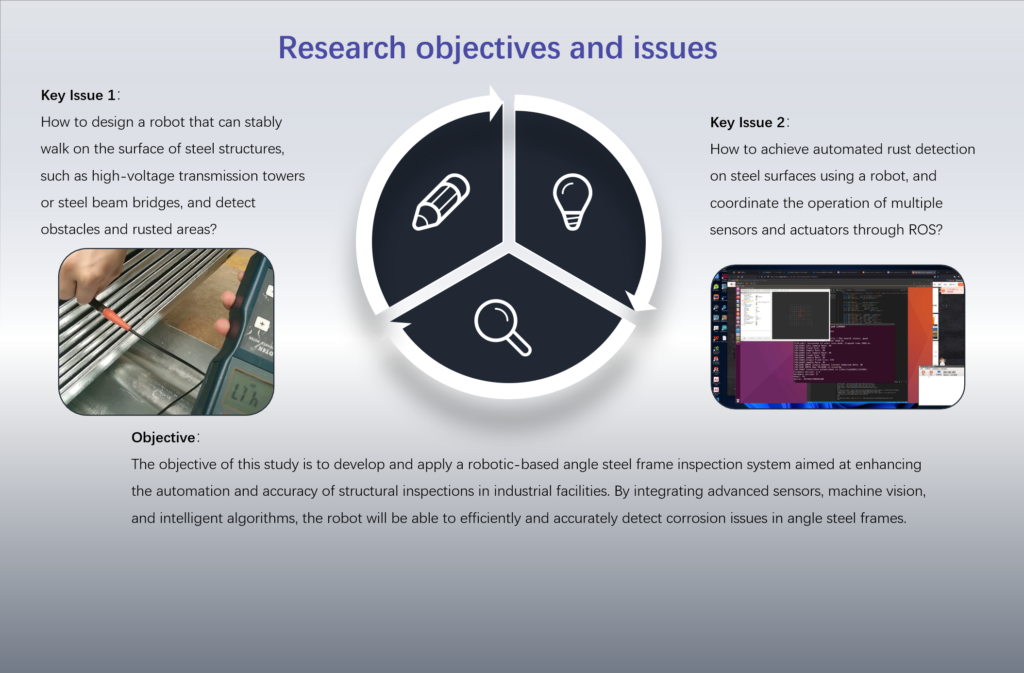
Research Objectives and Questions
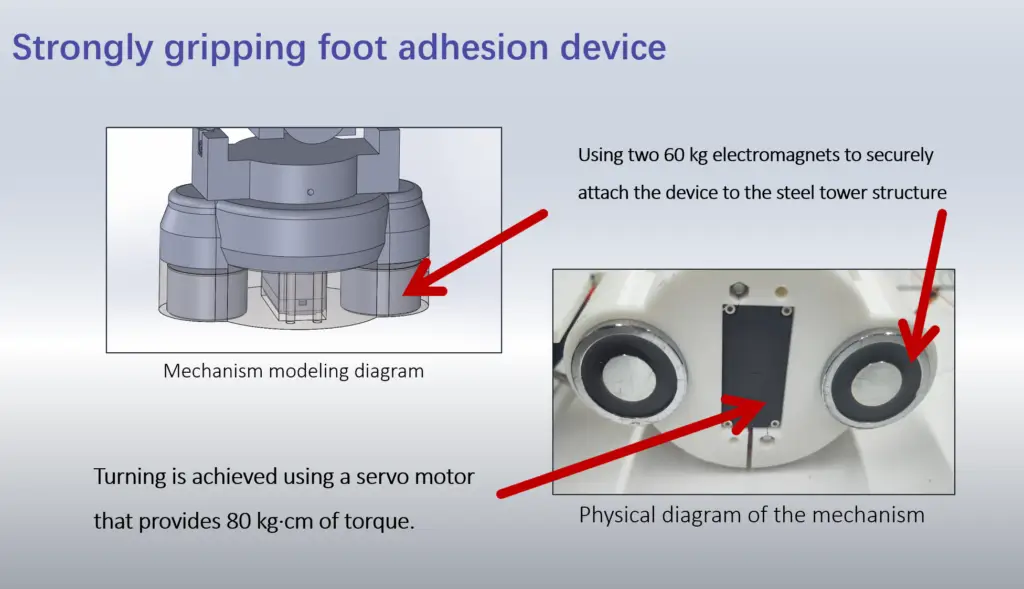
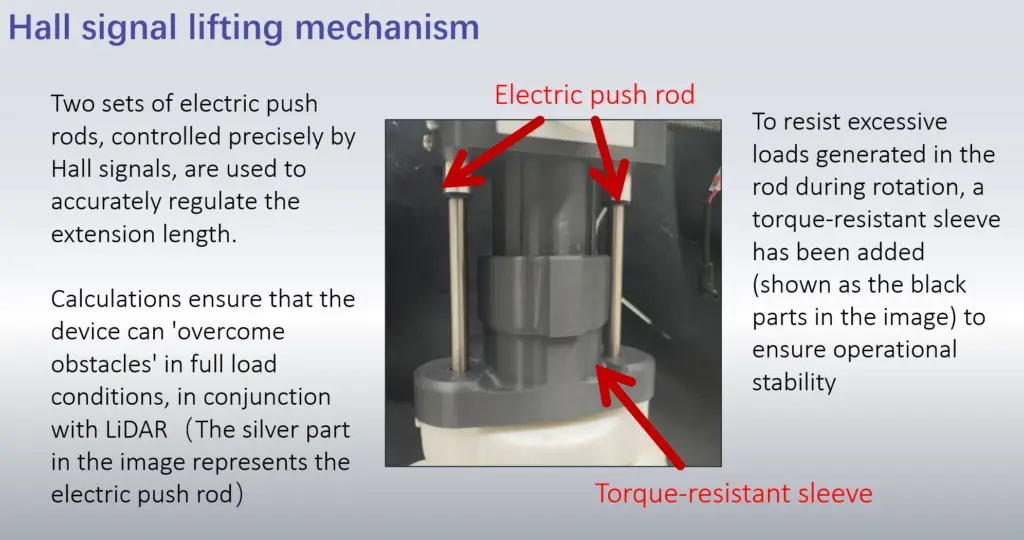
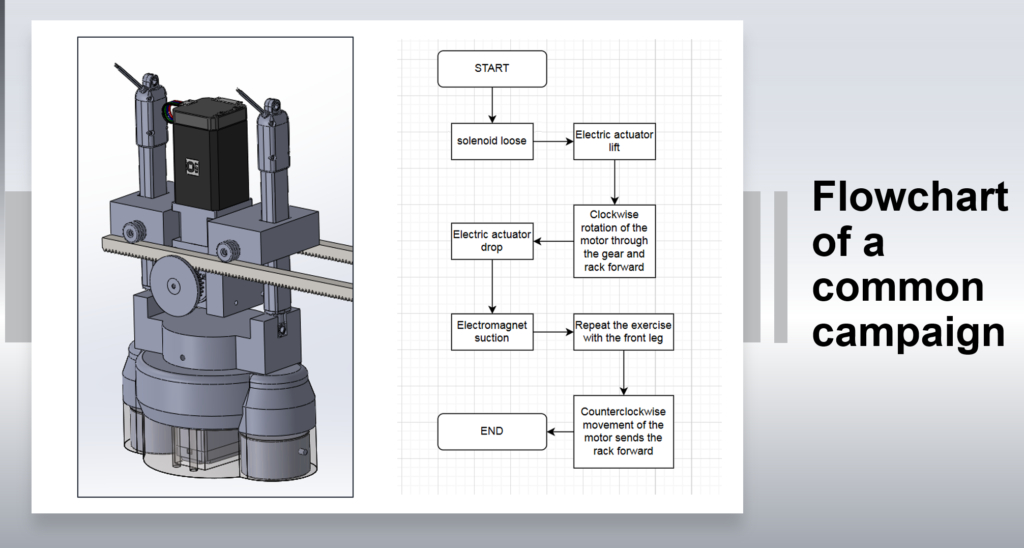
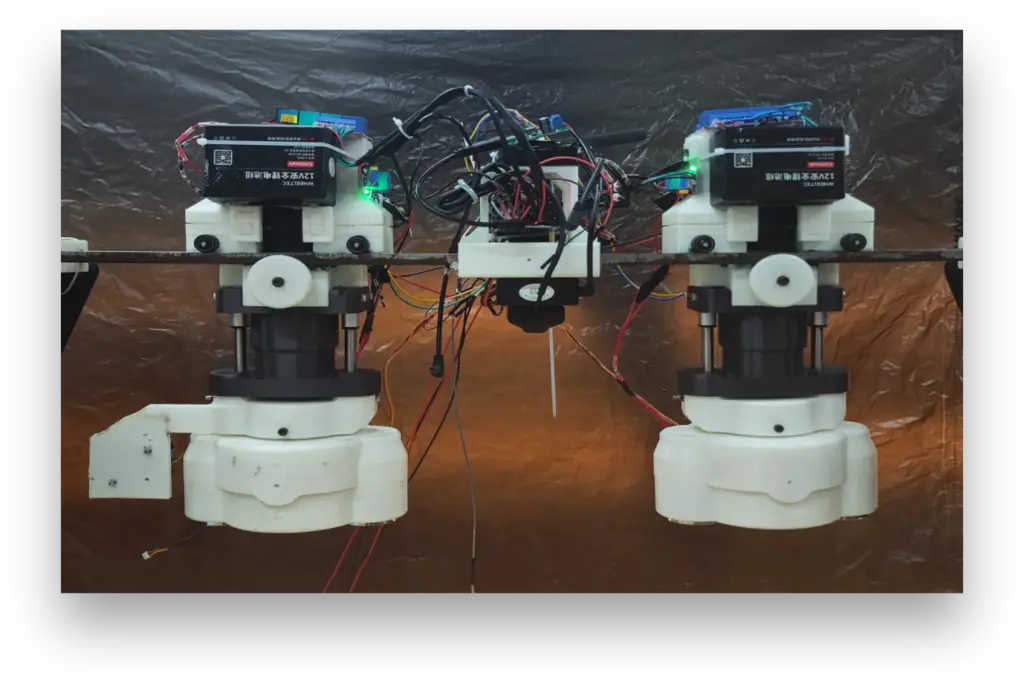
Structure introduction
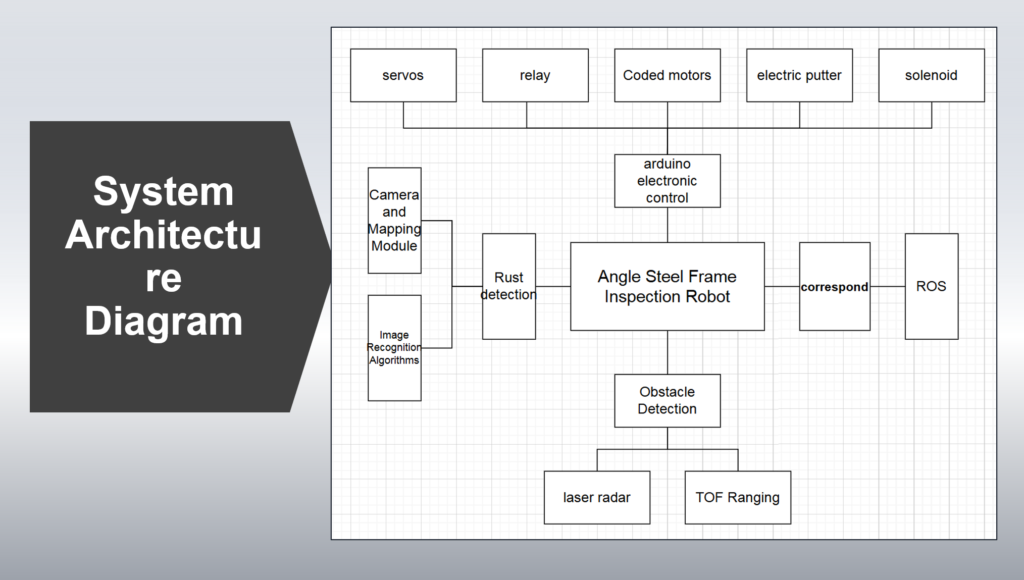
Overall System Architecture
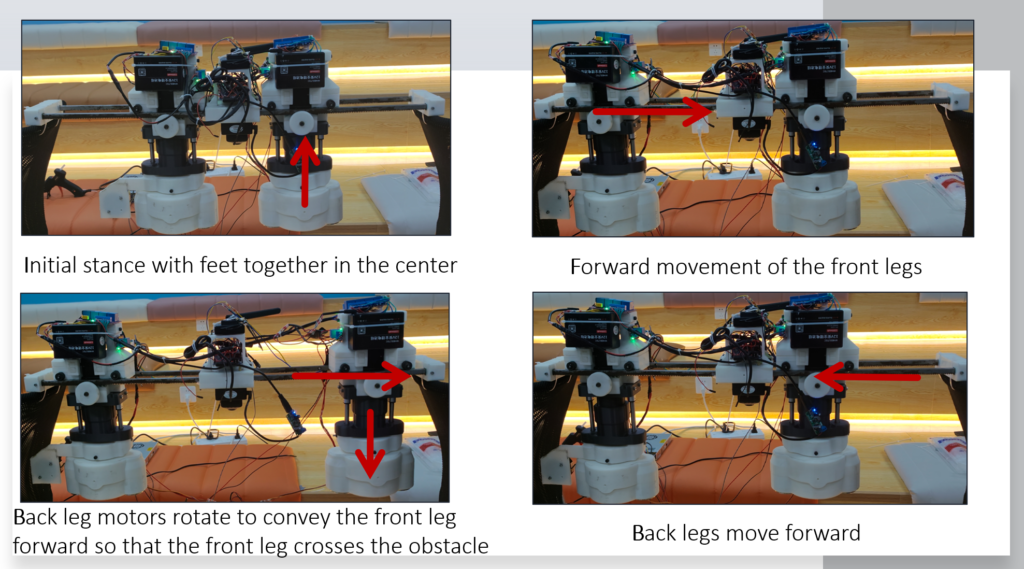
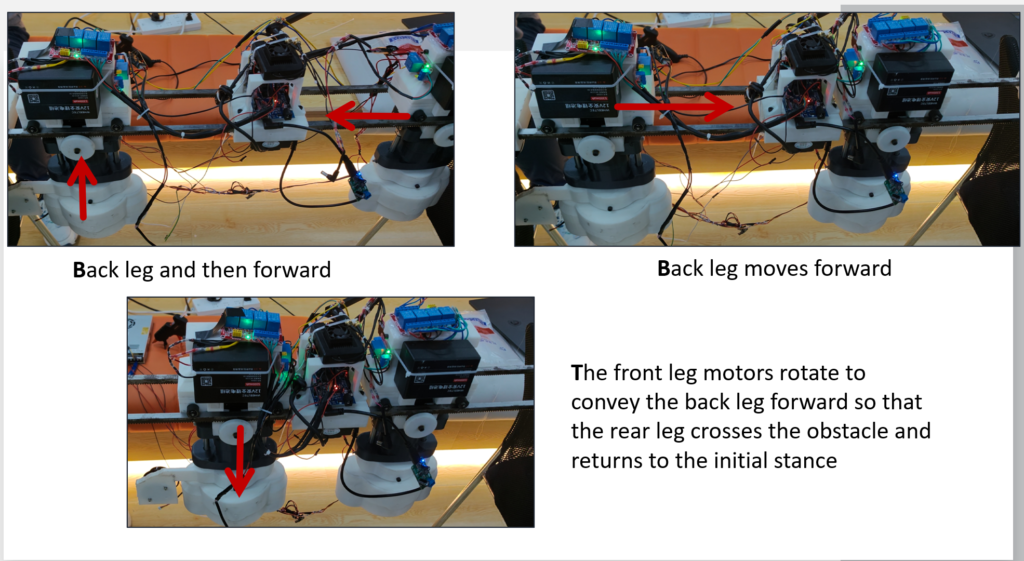
Motion Posture and Analysis
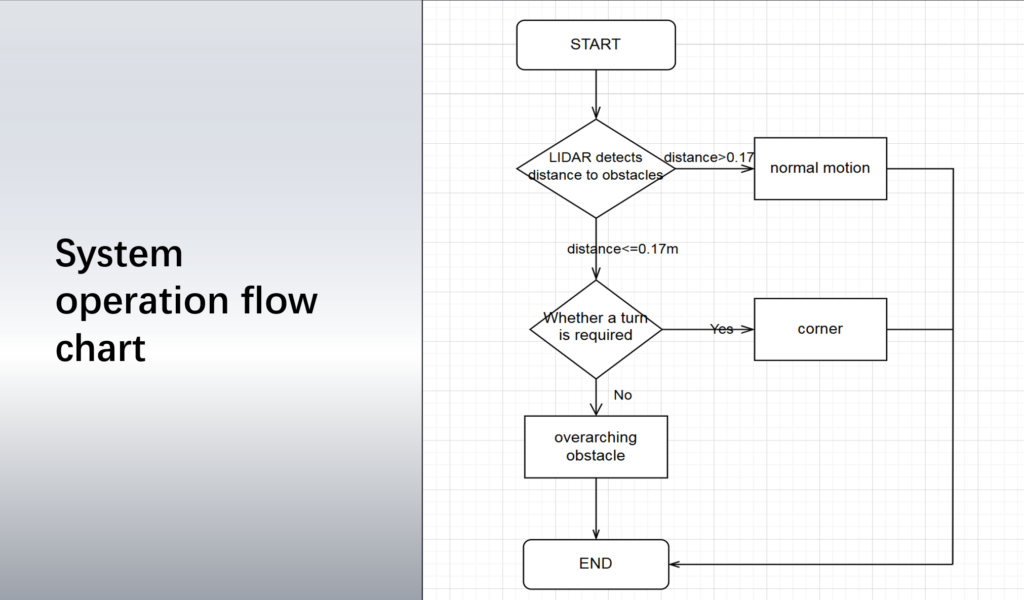
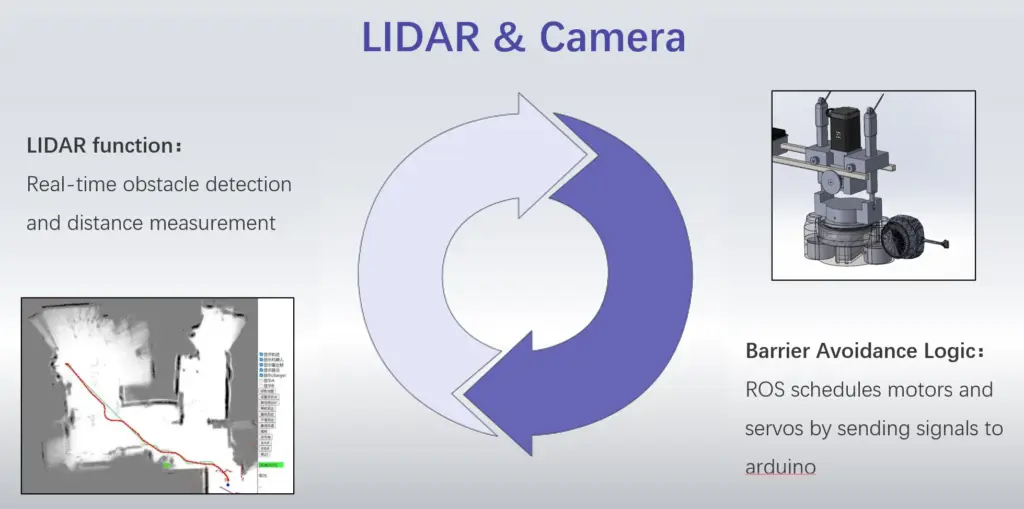
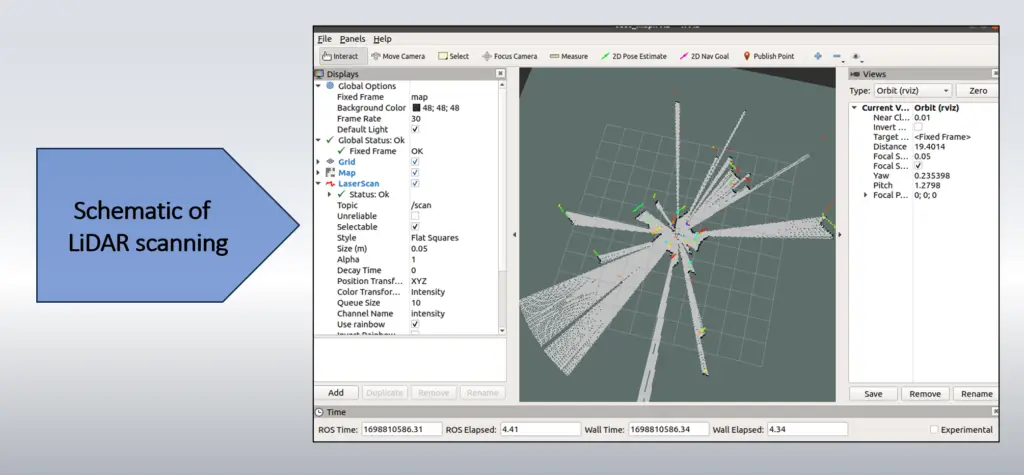
LiDAR and Obstacle Detection
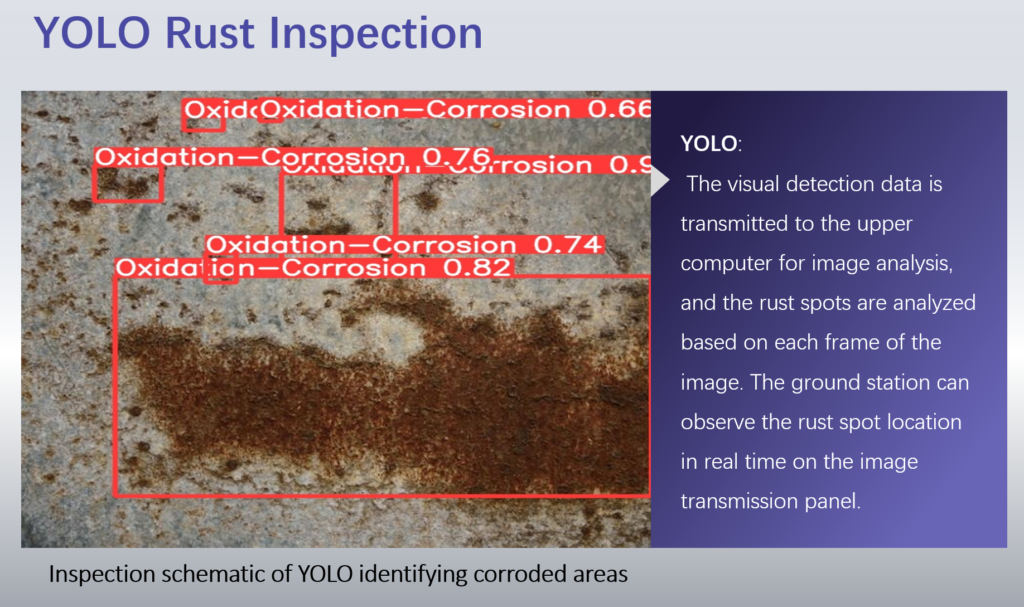
Camera and YOLO Corrosion Detection
Background for the study
Angle steel frames are
widely used in the supporting structures of buildings, bridges, and other industrial facilities. Over time, they are prone to corrosion, deformation, and damage, which can compromise safety. Traditional manual inspections are time-consuming and prone to human error, making it difficult to efficiently and accurately detect potential issues.
With the advancement of industrial automation, using robots for angle steel frame inspections has become an effective solution. Robots equipped with advanced sensors and algorithms can automatically and precisely detect structural problems, reducing human error and improving inspection efficiency.
Motivation for the study
Improve inspection efficiency and accuracy, reducing human error.
Enhance facility safety by detecting structural damage in a timely manner.
Lower labor costs and risks, especially in hazardous environments.
Promote technological innovation by applying robotics and intelligent inspection technologies to improve maintenance processes.